4.3 作用在 直接法上的收敛半径 Convergence Radius for Tracking
改动_Labby: sim(3)跟踪收敛半径
We evaluate the convergence radius on two exemplary sequences, the result is shown in Fig. 10.
我们通过(TUM RGB-D benchmark)两个图像序列来评估收敛半径(convergence radius),实验结果请参看示图10。
Even though direct image alignment is non-convex, we found that with the steps proposed in Sec. 3.5, surprisingly large camera movements can be tracked.
尽管直接法配准是个非凸性问题,但是(通过实验表明)根据3.5小节提出的算法步骤,我们得到令人振奋的结果,即:相机大范围的运动也是能被跟踪的。
It can also be observed that these measures only increase the convergence radius, and have no notable effect on tracking precision.
我们还发现,这些(3.5小节提出的)策略(即:使用ESM和增加图像金字塔层数),仅仅是增大了收敛半径 的范围,对跟踪的精度本身是没有特别的影响。
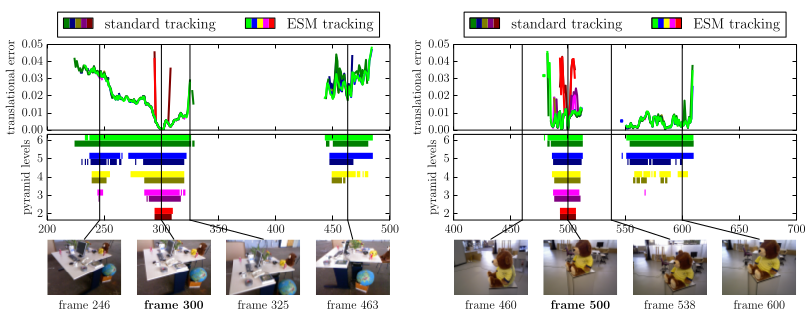
Image copy right belongs to engel14eccv paper, 图像摘录自engel14eccv论文
Fig. 10: Convergence radius and accuracy of direct image alignment with and without ESM minimization (indicated by light / dark) for a different number of pyramid levels (color).
图示10:收敛半径和 直接法的精准度,配准过程中有/无ESM,分别用(亮色/暗色)显示,不同的颜色表示使用的图像金字塔的层数。
All frames of the respective sequence are tracked on frame 300 (left) and frame 500 (right), using the identity as initialization.
在第300帧(左边)和第500帧(右边)周围被跟踪到的图像帧,所有这些实验初始化是一样的。
The bottom plots show for which frames tracking succeeds; the top plots show the final translational error.
底部显示了哪些帧跟踪成功(表述不确定,译者备注),顶部显示最终的平移误差。
ESM and more pyramid levels clearly increase the convergence radius, however these measures have no notable effect on tracking precision:
使用EMS和金字塔多层级可以增大收敛半径 的范围,但是对跟踪精度本身是没有特别的影响。
if tracking converges, it almost always converges to the same minimum.
如果跟踪收敛成功,它几乎总是收敛到相同的最小值。(需进一步解释,译者备注)