2.2 李群流体流形(Lie-Manifolds)上的加权高斯-牛顿(最小二乘)优化方法 Weighted Gauss-Newton Optimization on Lie-Manifolds
Two images are aligned by Gauss-Newton minimization of the photometric error

which gives the maximum-likelihood estimator for assuming i.i.d. Gaussian residuals.
两幅图像之间的配准,见公式(5)(就是最小二乘的优化问题,译者额外添加备注)可以认为是(以相机位姿 为自变量,单个光度测量误差项二次型是: ,整体光度测量误差项二次型(photometric error)之和 为误差函数的,译者额外添加备注)用高斯—牛顿(迭代法)的优化问题,其目的就是要最小化(整个)光度测量误差项二次型(之和),假设图像上的(单个)光度测量误差项,是独立同分布(i.i.d.)的高斯分布残差( Gaussian residuals),那么这个优化问题得到的结果,就是 的极大似然值(即:优化后的相机姿态,译者额外添加备注)。
We use a left-compositional formulation: Starting with an initial estimate , in each iteration a left-multiplied increment is computed by solving for the minimum of a Gauss-Newton second-order approximation of :

见公式(7),(高斯-牛顿迭代过程中) 使用一个左乘复合迭代函数(left-compositional formulation):从初始估计(相机姿态变换) 开始,(高斯-牛顿)每次迭代过程中,左乘更新量 ,这个更新量是通过(误差函数) 的高斯-牛顿二阶近似求解的最小值得到的:(如下公式6)
where is the derivative of the stacked residual vector with respect to a left-multiplied increment, and the Gauss-Newton approximation of the Hessian of .
其中: 是残差向量 的求导,(即:图像光度测量误差项的雅克比矩阵), 用(一阶)雅克比矩阵( )的方式,去近似(误差函数) 的二阶海森矩阵(Hessian),这样求得左乘更新量 ,见公式(6)。
The new estimate is then obtained by multiplication with the computed update

见公式(7),通过不断左乘更新量 ,就得到了最新更新的(相机姿态)估计,(这里用到了2.1小节的结合律运算符,译者额外添加备注)
In order to be robust to outliers arising e.g. from occlusions or reflections, different weighting-schemes [14] have been proposed, resulting in an iteratively reweighted least-squares problem:
图像配准过程中会经常发生,相机视野遮挡或光线反射等问题,造成图像配准容易产生外点(outliers,图像误匹配, 异常值)。为了让配准算法更加鲁棒,论文[14]提出了一种(对测量误差项)加权方法,其实质就是加权迭代最小二乘问题(iteratively re weighted least-squares):
In each iteration, a weight matrix is computed which down-weights large residuals.
每次迭代过程中去算一个权重矩阵 ,它的作用就是(对方差)较大的残差,降低其权重。
The iteratively solved error function then becomes

这样,误差函数 就改写成(加权迭代最小二次型求和)见公式(8):(与公式(5)相比,多了一个权重矩阵,译者额外添加备注)
and the update is computed as

于是,它的更新量 计算就改写成,见公式(9): (相比公式(6),加入权重矩阵)
Assuming the residuals to be independent, the inverse of the Hessian from the last iteration is an estimate for the covariance of a left-multiplied error onto the final result, that is

假设残差是独立的随机变量,那么求解相机姿态 数学模型,就可以看做是公式(10): 其中左乘误差项(即二阶的海森—逆矩阵),服从高斯分布 ,二阶海森—逆矩阵的求解就是每次通过前一次迭代 (用一阶雅克比来近似)计算得到。 (即:实际测量的误差值在真实偏差一定范围内波动,符合高斯分布,译者额外添加备注) (谢谢Solomon的解释)
假设残差是独立的随机变量,那么可以用二阶海森—逆矩阵来近似表示 , 其中, 二阶海森—逆矩阵的求解就是每次通过前一次迭代 (用一阶雅克比来近似)计算得到。 那么求解相机姿态 数学模型,就可以看做是公式(10), 其中,左乘误差项 服从高斯分布 。
 image copy right belongs to engel14eccv paper, 图像摘录自 engel14eccv论文
image copy right belongs to engel14eccv paper, 图像摘录自 engel14eccv论文
Fig. 3: Overview over the complete LSD-SLAM algorithm.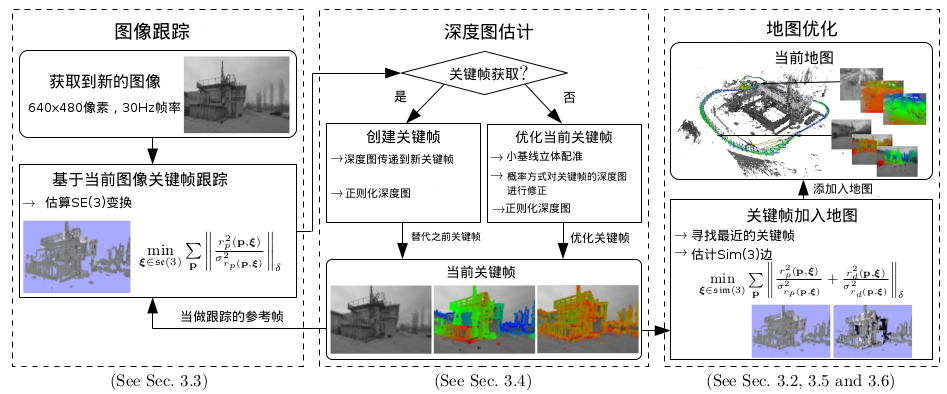 示图3: LSD-SLAM算法的整体流程示意图。
示图3: LSD-SLAM算法的整体流程示意图。
图像跟踪流程详见3.3小节, 深度图估计详见3.4小节,地图优化详见3.2,3.5和3.6小节
In practice, the residuals are highly correlated, such that is only a lower bound - yet it contains valuable information about the correlation between noise on the different degrees of freedom.
实际情况中,残差之间(光度测量误差之间)是高度相关性的(因为我们假设残差之间是独立不相干的变量i.i.d.),使得这个协方差 仅仅是个下限(这个补充还需要确认)—但是它仍然包含了噪声之间在不同自由度上的相关性,这一有用信息。(高度相关性作何理解? 方差下限作何理解? 感谢和陈创荣的讨论,一种观点认为残差是独立不相干的随机变量,但是实际上这些变量间是应该是相关性的,所以如果相关性的话,方差应该会更大。译者额外添加备注,还需要确认,感谢清华大学高翔博士的指点,建议译者参考2013年Engel的Paper)
Semi-Dense Visual Odometry for a Monocular Camera https://vision.cs.tum.edu/_media/spezial/bib/engel2013iccv.pdf
Note that we follow a left-multiplication convention, equivalent results can be obtained using a right-multiplication convention.
注意到,我们这里使用左乘法则,如果使用右乘法则,也可以获得相等的结果。
However, the estimated covariance depends on the multiplication order – when used in a pose graph optimization framework, this has to be taken into account.
然而,估计协方差 取决于乘法的顺序—因此当使用姿态图优化(软件)框架的时候,这一点要考虑进去。
The left-multiplication convention used here is consistent with [23], while e.g. the default type-implementation in g2o [18] assumes right-multiplication.
这里使用的左乘规则和论文[23]是一致的,然而像g2o [18] 姿态图优化(软件)框架,默认的实现类型是使用右乘规则。(请在使用的时候注意,译者额外添加备注)