3.4 深度图估计 Depth Map Estimation
关键帧的选择 Keyframe Selection.
If the camera moves too far away from the existing map, a new keyframe is created from the most recent tracked image.
如果相机移动离“现有地图太远“(远是如何定义的,译者额外添加备注),则从最近跟踪的新图像帧创建新的关键帧(换一句话说,创建新关键帧是根据相机移动距离来判断的,创建关键帧为的是之后地图创建,即:插入关键帧到地图需要满足的条件,并且作用在之后的地图优化中,译者额外添加备注)。
We threshold a weighted combination of relative distance and angle to the current keyframe:

where is a diagonal matrix containing the weights.
(首先通过公式16.来计算当前关键帧和图像帧的加权距离)我们设置一个(当前关键帧和图像帧的)距离阈值,(然后两者比较来判定是否触发新关键帧创建),其中, 是包含权重的对角(线矩)阵。
Note that, as described in the following section, each keyframe is scaled such that its mean inverse depth is one.
注意:下面所提及的每一个关键帧,它的深度都被平均化,也就是说,它的深度(即:兴趣像素点)的平均逆深度为1。(此处有待代码确认,这里翻译可能有问题)comment by hyj 是正确的(谢谢贺一家点拨)
改动_Labby: 注意,在文章后续部分,每一个关键帧都被缩放了,以使得它们的平均逆深度为1.
This threshold is therefore relative to the current scale of the scene, and ensures sufficient possibilities for small-baseline stereo comparisons.
因此,这个距离阈值和当前场景的(规模大小)尺度是相关联的,并同时还要满足小基线立体配准的要求。
深度图的创建 Depth Map Creation.
Once a new frame is chosen to become a keyframe, its depth map is initialized by projecting points from the previous keyframe into it, followed by one iteration of spatial regularization and outlier removal as proposed in [9].
一旦新图像帧被选择成为(新)关键帧,需要初始化它的深度图(这个过程还是比较复杂,这里作者略写,请参考论文[9],译者额外添加备注),即:把上一帧关键帧的兴趣点投影到新创建的关键帧上(得到这一帧的兴趣点)。然后进行正则迭代(即:兴趣点深度正则化)以及外点(异常值)移除,具体细节请参考论文[9]介绍。
Afterwards, the depth map is scaled to have a mean inverse depth of one - this scaling factor is directly incorporated into the camera pose.
(正则迭代)之后,深度图被平均至逆深度为1,并通过 变换缩放尺度因子。
Finally, it replaces the previous keyframe and is used for tracking subsequent new frames.
最后,这个关键帧替换前一帧关键帧,并视为接下来的图像跟踪参考帧,用于跟踪后续的新图像帧(这里关联到“图像跟踪”模块,译者额外添加备注)。
深度图的优化 Depth Map Refinement.
Tracked frames that do not become a keyframe are used to refine the current keyframe:
如果被跟踪的图像帧没有成为新的关键帧(不满足距离触发条件),那么就用来优化当前关键帧(即:当前跟踪参考帧,进行深度更新,译者额外添加备注)
如果被跟踪的图像帧(不满足距离触发条件),那么就不用创建新关键帧,而是用来对当前关键帧(即:跟踪参考帧)的修正优化(即:估计深度和计算深度不确定性)。
A high number of very efficient small baseline stereo comparisons is performed for image regions where the expected stereo accuracy is sufficiently large, as described in [9].
如论文[9]中所述,对兴趣点图像区域,进行大量的小基线立体配准(作者这里略写,包括如何选择参考帧,如何灰度误差匹配,计算几何误差,视差等等,详细流程,请参考论文[9])来更新深度。
The result is incorporated into the existing depth map, thereby refining it and potentially adding new pixels – this is done using the filtering approach proposed in [9].
小基线立体配准的结果被更新到(当前关键帧的)深度图中,(除了上述估计深度外,还要计算深度的不确定性),修正深度,同时还会增加入新的像素点—这个过程使用了论文[9]中的(卡尔曼)滤波方式来对深度的融合。
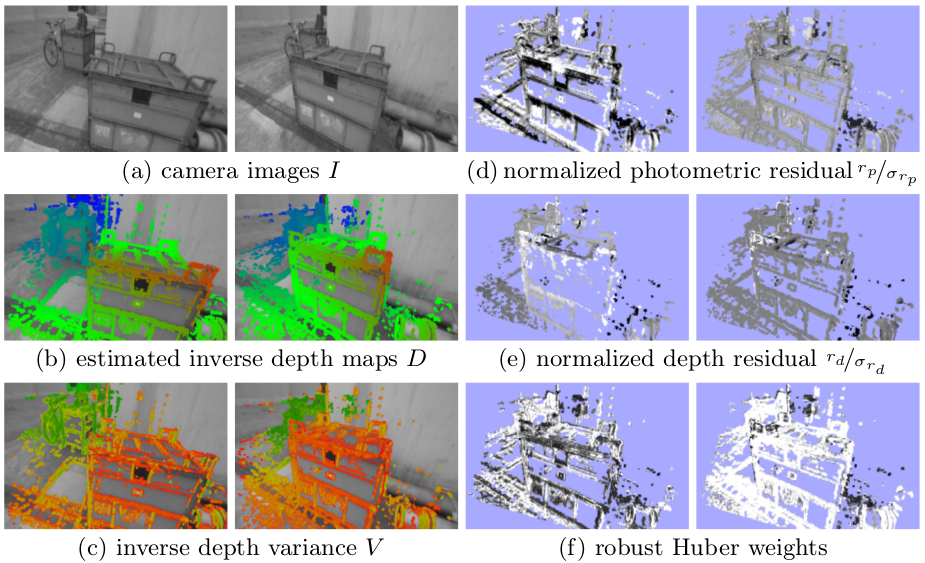 image copy right belongs to engel14eccv paper, 图像摘录自 engel14eccv论文
image copy right belongs to engel14eccv paper, 图像摘录自 engel14eccv论文
Fig. 5: Direct keyframe alignment on :
图示5:关键帧在 上的直接法配准:
(a)-(c): two keyframes with associated depth and depth variance.
(a)—(c)两个(相邻)关键帧之间的 [相机]图像,深度图[估计]和深度方差可视化示图
(d)-(f): photometric residual, depth residual and Huber weights, before minimization (left), and after minimization (right).
(d)—(f)[归一化的]光度测量残差,[归一化的]深度残差和Huber加权可视化示图,(左侧)在最小二乘优化前的示图,(右侧)在最小二乘优化后的示图