3.5 E. Keyframe Insertion 关键帧的插入
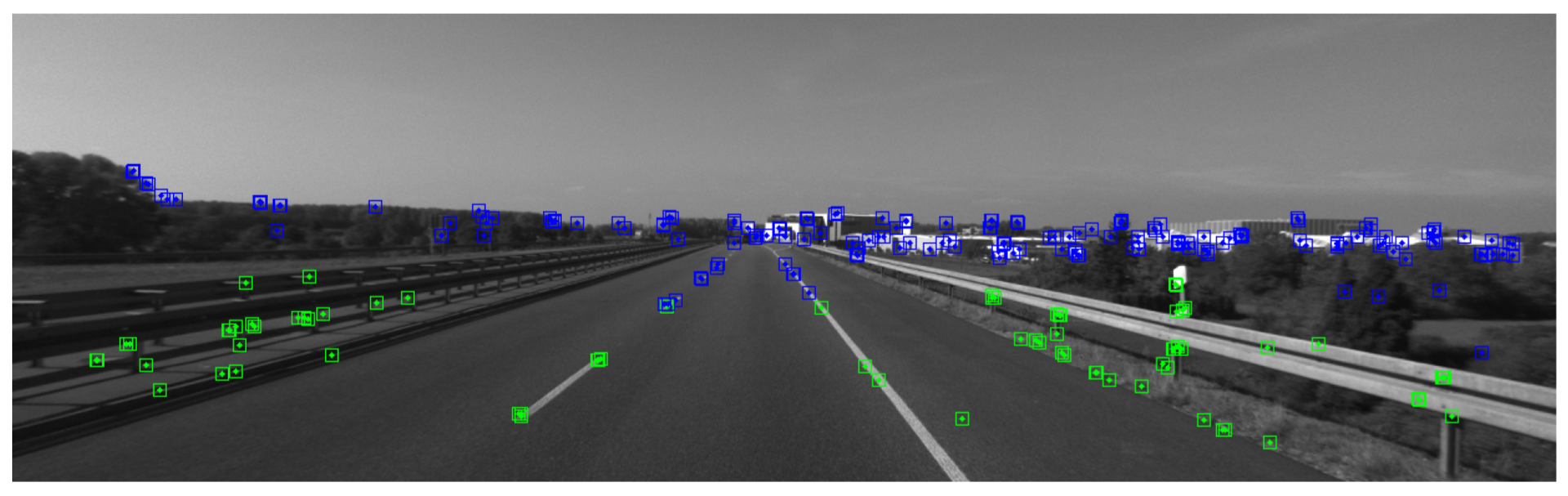
image copy right belongs to Raúl Mur-Artal and Juan D. Tardós. ORB-SLAM2: an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras. ArXiv preprint arXiv:1610.06475
图像摘录自ORB-SLAM2: an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras. ArXiv preprint arXiv:1610.06475
Fig. 3. Tracked points in a highway.
图3 高速公路的跟踪点。
Green points have a depth less than 40 times the stereo baseline, while blue points are further away.
绿色的特征点深度小于40倍双目的基线,蓝色特征点大于40倍双目的基线,
In this kind of sequences it is important to insert keyframes often enough so that the amount of close points allows for accurate translation estimation.
在这种数据集当中,需要插入大量的关键帧,
Far points contribute to estimate orientation but provide weak information for translation and scale.
以便于能够让近处的特征点更加精确的估计平移和尺度,远处的特征点来估计方向,但是不能够计算平移和尺度。
3.5.1 paragraph
ORB-SLAM2 follows the policy introduced in monocular ORB-SLAM of inserting keyframes very often and culling redundant ones afterwards.
ORB-SLAM2遵循在单目ORB-SLAM中提的法则,即经常插入关键帧并且剔除上一帧的冗余。
The distinction between close and far stereo points allows us to introduce a new condition for keyframe insertion, which can be critical in challenging environments where a big part of the scene is far from the stereo sensor, as shown in Fig. 3.
在远近特征点的差异为我们插入一个新的关键帧提供了条件,这在大场景的条件下是至关重要的,如图3所示。
In such environment we need to have a sufficient amount of close points to accurately estimate translation, therefore if the number of tracked close points drops below and the frame could create at least new close stereo points, the system will insert a new keyframe.
在这样的环境中,我们需要一个大量的近点用以精确估计平移,因而如果这个被跟踪近点小于 并且这个帧将会创造 个新邻近立体点,这个系统将会插入一个新的关键帧,
We empirically found that and works well in all our experiments.
我们经验值认为,当 和 的条件下我们效果最好。