3.3 C. Bundle Adjustment with Monocular and Stereo Constraints 使用单目或者双目光束优化法
3.3.1 paragraph
Our system performs bundle adjustment to optimize the camera pose in the Tracking (motion-only BA), to optimize a local window of keyframes and points in the Local Mapping (local BA), and after a loop closure to optimize all keyframes and points (full BA).
我们的系统采用光束优化法(BA),优化在跟踪过程(纯运动BA)中相机的位姿,优化本地窗口的关键帧和局部地图的特征点(局部BA),并且在回环检测之后优化所有的关键帧和特征点(全局BA)。
We use the Levenberg-Marquadt implementation in g2o [19].
我们在g2o当中使用Levenberg-Marquadt方法[19]。
3.3.2 paragraph
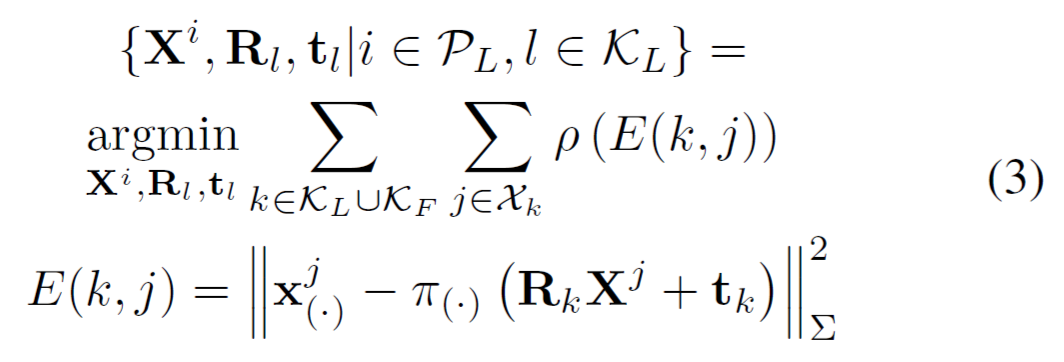
optimizes the camera orientation and position , minimizing the reprojection error between matched 3D points in world coordinates and keypoints , either monocular or stereo , with the set of all matches:
,优化相机旋转矩阵 和位置 ,最小化世界坐标系下匹配3D点云 和 特征点(单目的 或双目的 ,其中 的重投影误差:

where is the robust Huber cost function and the covariance matrix associated to the scale of the keypoint.
在这个式子当中, 是强健的Huber的cost函数, 是协方差矩阵,关联对于特征点的尺度。
The projection functions , monocular and stereo , are defined as follows:
这个投影函数 ,单目的时候使用 ,修正双目的时候用 ,他们的定义如下:
where is the focal length, is the principal point and the baseline, all known from calibration.
在这个式子当中 是焦距, 是主要点(象点), 是基线,所有的这些参数都是通过标定获得。
3.3.3 paragraph
optimizes a set of covisible keyframes and all points seen in those keyframes .
采用一系列可用的关键帧 和所有在关键帧可观点 ,
All other keyframes , not in , observing points in contribute to the cost function but remain fixed in the optimization.
所有的其他关键帧是 ,而不是 ,观察 当中所有的特征点用于代价函数,但是在优化中是固定的。
Defining as the set of matches between points in and keypoints in a keyframe , the optimization problem is the following:
定义 为 中关键帧 的一系列匹配特征点,这个优化问题如下:
3.3.4 paragraph
is the specific case of local BA, where all keyframes and points in the map are optimized, except the origin keyframe that is fixed to eliminate the gauge freedom.
是局部光束法的一个特例,这个方法除了初始帧所有的关键帧和点在地图当中都会被优化.初始帧是固定的,用来消除随机化。