审稿中...
3. ORB-SLAM2
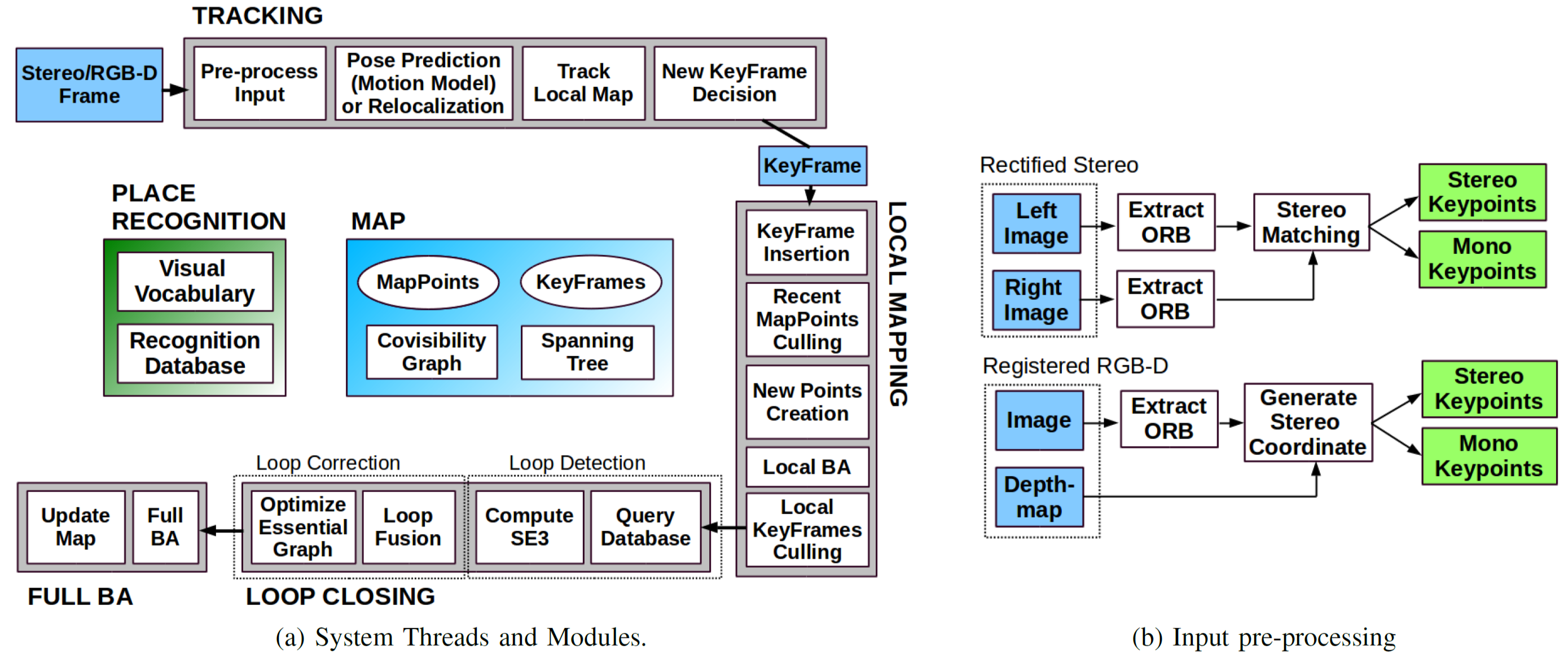
image copy right belongs to Raúl Mur-Artal and Juan D. Tardós. ORB-SLAM2: an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras. ArXiv preprint arXiv:1610.06475
图像摘录自ORB-SLAM2: an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras. ArXiv preprint arXiv:1610.06475
Fig. 2. ORB-SLAM2 is composed of three main parallel threads: Tracking, Local Mapping and Loop Closing, which can create a fourth thread to perform full BA after a loop closure.
图2,ORB-SLAM2由三个平行的线程组成,跟踪,局部建图和回环检测。在一次回环检测后,会执行第四个线程,去执行BA优化。
The tracking thread pre-process the stereo or RGB-D input so that the rest of the system operates independently of the input sensor. Although it is not shown in this figure, ORB-SLAM2 also works with a monocular input as in [1].
跟踪的线程在双目或者RGB-D输入之前进行,因此剩下的系统模块能够跟传感器模块独立运行。单目的ORB-SLAM2工作图也是这幅图。
(a) System Threads and Modules. 图a ORB-SLAM2的系统线程和模块(包括它们之间的关系和工作流程)
(b) Input pre-processing 图b 双目或者RGB-D输入的预处理流程
TODO 流程图中文化...
3.1 paragraph
ORB-SLAM2 for stereo and RGB-D cameras is built on our monocular feature-based ORB-SLAM [1], whose main components are summarized here for reader convenience.
针对双目相机和RGB-D相机的ORB-SLAM2建立在单目ORB-SLAM的基础上,
A general overview of the system is shown in Fig. 2.
它的核心组件,如图2所示。
The system has three main parallel threads:
这个系统主要有3个并行的线程:
1) the Tracking to localize the camera with every frame by finding feature matches to the local map and minimizing the reprojection error applying motion-only BA,
1、通过寻找对局部地图的特征,并且进行匹配,以及只运用BA算法来最小化重投影误差,进行跟踪和定位每帧的相机。
2) the Local Mapping to manage the local map and optimize it, performing local BA,
2、运用局部的BA算法设置局比地图并且优化。
3) the Loop Closing to detect large loops and correct the accumulated drift by performing a pose-graph optimization.
3、回环检测检能够通过执行位姿图的优化来更正累计漂移误差。
This thread launches a fourth thread to perform full BA after the pose-graph optimization, to compute the optimal structure and motion solution.
在位姿优化之后,会启动第四个线程来执行全局BA算法,来计算整个系统最优结构和运动的结果。
3.2 paragraph
The system has embedded a Place Recognition module based on DBoW2 [16] for relocalization, in case of tracking failure (e.g. an occlusion) or for reinitialization in an already mapped scene, and for loop detection.
这个系统是一个基于DBoW2[16]的嵌入式位置识别模型,来达到重定位,防止跟踪失败(如遮挡),或者已知地图的场景重初始化,和回环检测的目的。
The system maintains a covisibiliy graph [8] that links any two keyframes observing common points and a minimum spanning tree connecting all keyframes.
这个系统产生关联可见的图[8],连接两个关键帧的共同点,连接所有关键帧的最小生成树方面。
These graph structures allow to retrieve local windows of keyframes, so that Tracking and Local Mapping operate locally, allowing to work on large environments, and serve as structure for the pose-graph optimization performed when closing a loop.
这些关键帧的图结构能够得到一个关键帧的局部的窗口,以便于跟踪和局部建图,并且在大型的环境当中的回环检测部分,作为一种图优化的结构。
3.3 paragraph
The system uses the same ORB features [17] for tracking, mapping and place recognition tasks.
这个系统使用相同的ORB特征进行跟踪,建图和位置识别的任务。
These features are robust to rotation and scale and present a good invariance to camera auto-gain and auto-exposure, and illumination changes.
这些特征在旋转不变和尺度不变性上有良好的鲁棒性,同时对相机的自动增益,曝光和光线的变化表现出良好的稳定性。
Moreover they are fast to extract and match allowing for real-time operation and show good precision/recall performance in bag-of-word place recognition [18].
并且能够迅速的提取特征和进行匹配,能够满足实时操作的需求,能够在基于词袋的位置识别过程中,显示出良好的精度[18]。
3.4 paragraph
In the rest of this section we present how stereo/depth information is exploited and which elements of the system are affected.
在本章的剩下的部分当中,我将会展示双目或者深度信息是如何利用,和到底会影响系统中的那些部分。
For a detailed description of each system block, we refer the reader to our monocular publication [1].
对每个系统块更详尽的描述,可参见论文[1]