4.3 C. TUM RGB-D Dataset | TUM RGB-D 数据集

image copy right belongs to Raúl Mur-Artal and Juan D. Tardós. ORB-SLAM2: an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras. ArXiv preprint arXiv:1610.06475
图像摘录自ORB-SLAM2: an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras. ArXiv preprint arXiv:1610.06475
表3 TUM RGB-D数据集。平移的最小均方误差比较(米)。
4.3.1 paragraph
The TUM RGB-D dataset [3] contains indoors sequences from RGB-D sensors grouped in several categories to evaluate object reconstruction and SLAM/odometry methods under different texture, illumination and structure conditions.
TUM RGB-D数据集包含一些室内的序列,在不同的纹理下,不同的光照和不同的结构条件,从RGB-D传感器采集到的数据中分别去评估物体的重建和SLAM/视觉里程计的性能。
We show results in a subset of sequences where most RGB-D methods are usually evaluated.
和大多数RGB-DSLAM方法一样,我们将实验结果展示在一个序列子集当中,
In Table III we compare our accuracy to the following state-of-the-art methods:
- ElasticFusion [15],
- Kintinuous [12],
- DVO-SLAM [14] and
- RGB-D SLAM [13].
在表格3当中,我们比较我们的精准性和其他方法,例如
- ElasticFusion [15],
- Kintinuous [12],
- DVO-SLAM [14] 和
- RGB-D SLAM [13]。
Our method is the only one based on bundle adjustment and outperforms the other approaches in most sequences.
ORB-SLAM2是唯一一种基于光束流差法,并且比其他的方法都更加优秀。
As we already noticed for RGB-D SLAM results in [1], depthmaps for sequences has a 4% scale bias, probably coming from miscalibration, that we have compensated in our runs and could partly explain our significantly better results.
我们已经注意到RGB-DSLAM,深度地图对于freiburg2序列有一个4%的尺度误差,误差可能来自错误的标定,我们已经在运行过程中,进行了一定程度的补偿。这能够部分解释我们取得好的结果的原因。
Fig. 6 shows the point clouds that results from backprojecting the sensor depth maps from the computed keyframe poses in four sequences.
图6显示的点云的结果来源于后端映射的传感器深度的地图,从计算关键帧的位姿在四个序列当中。
The good definition and the straight contours of desks and posters proves the high accuracy localization of our approach.
实验的结果显示,ORB-SLAM2很好的展示了桌子和海报的轮廓线,以及高精度的重定位。
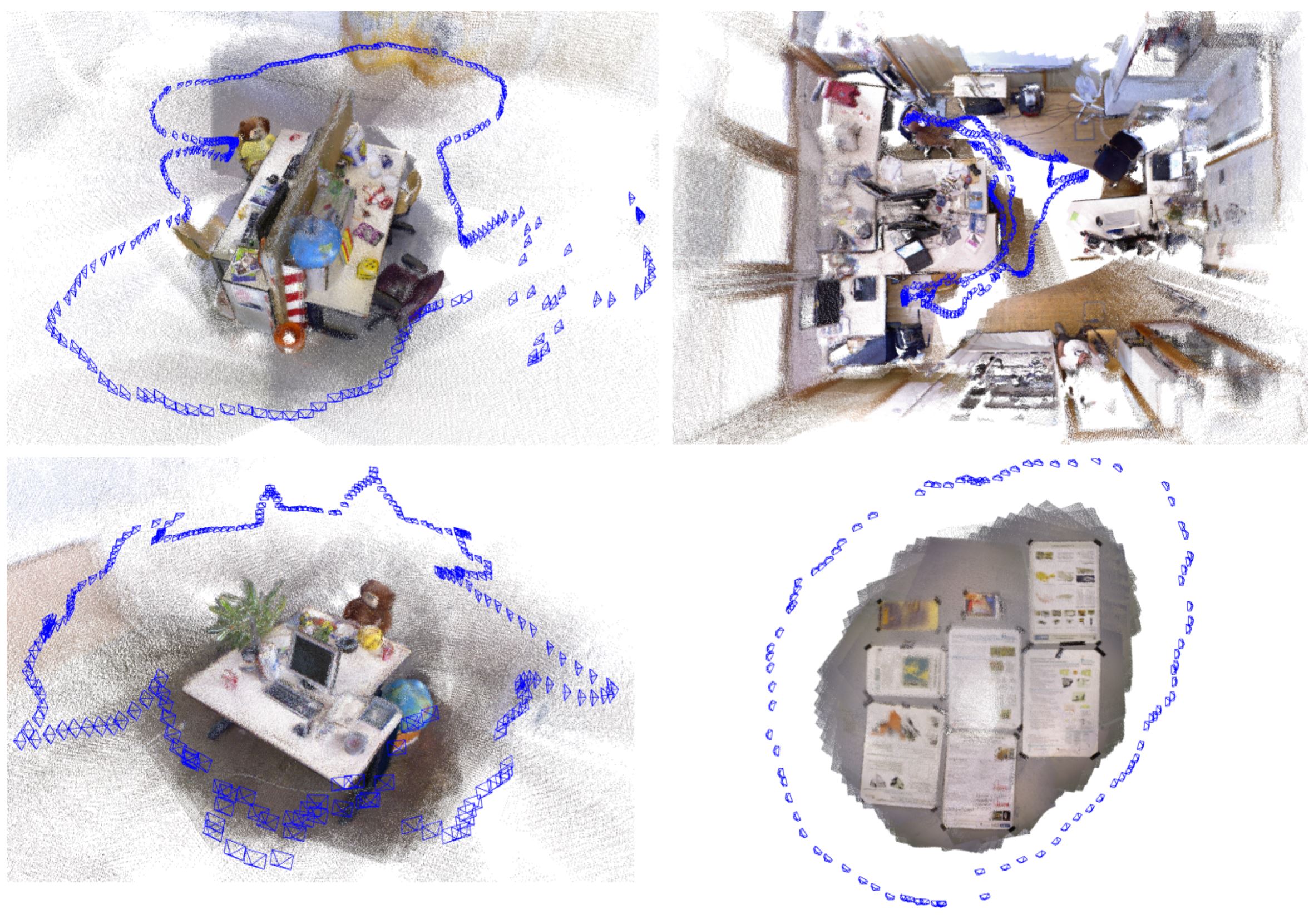
image copy right belongs to Raúl Mur-Artal and Juan D. Tardós. ORB-SLAM2: an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras. ArXiv preprint arXiv:1610.06475
图像摘录自ORB-SLAM2: an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras. ArXiv preprint arXiv:1610.06475
Fig. 6. Dense pointcloud reconstructions from estimated keyframe poses and sensor depth maps in TUM RGB-D , , and .
图6 TUM RGB-D数据的 , , 和 序列的通过评估关键帧的位姿和深度图进行稠密的点云重建图。