II CONCEPT OF PLACE IN ROBOTICS AND THE
NATURAL KINGDOM
地点机器人学科和自然界中是如何定义场景的?(直接意译,额外批注)
2.1 paragraph
The problem of navigation and place recognition has a venerable tradition in psychology and neuroscience.
导航和场景识别问题在心理学和神经科学中就是一个津津乐道的话题经典问题。
In 1948, the research of Tolman [20] on rats navigating mazes motivated him to propose the cognitive map—a mental representation of the world with information about relationships between places that animals gradually learn.
1948年Tolman在大老鼠走迷宫的研究中[20],提出了认知地图(cognitive map)——动物逐渐学习到的不同我们得以深入了解地点之间相互关系信息,是世界信息的心理表征。就是,通过在动物(自身)渐进式学习过程中(结合过去的经验),会对不同场景之间进行关联,然后在大脑中产生的对环境建模地图(world)的信息。即动物在环境中通过不断学习建立场景间的相互关系实现对环境的认知表示
The concept of the cognitive map, while not without its critics [21], [22], has been influential not only in psychology and neuroscience, but also areas such as urban planning, where Lynch [23] proposed that the elements of a cognitive map be paths, edges, nodes, districts, and landmarks, and in robotics, where mapping approaches have been inspired by the cognitive map [24], [25], and by its successor, the spatial semantic hierarchy [26].
对于认知地图的定义概念,虽然也有人提出质疑批判的[21],[22],但其概念不仅仅影响着涉及心理学和神经学科等领域,同时也作用在其他研究领域,包括城市规划,诸如:Lynch[23]提出在城市规划中,认知地图的基本元素是:路径(path)、边缘(edge)、节点(node)、区域(district)和地标(landmark),和在机器人学科中,建图(mapping)方式法也深受认知地图[24]、[25],以及空间语义层次关联图(简称:SSH,spatial semantic hierarchy[26])的启发(其中,SSH可以认为是Cognitive Map的“进阶版”)。及空间语义层次[ 26 ]的启发领域。
copyright belongs to Visual Place Recognition: A Survey 图片摘录自基于视觉的场景识别:综述
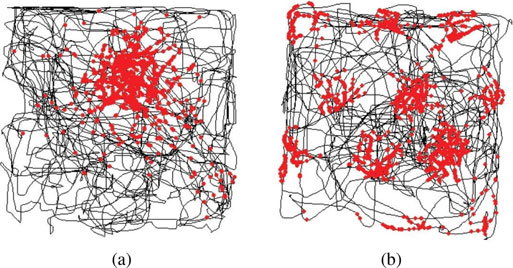
Fig. 2. Neuroscience experiments have shown that the brains of animals such as rats contain place cell and grid cell neurons.
图2,动物神经实验显示,动物,例如老鼠的大脑含有“位置”细胞和“网格”细胞。
Each place cell fires strongly at one location in an environment, while each grid cell fires at multiple, regularly spaced locations. 该图显示了当动物在一个方形环境中行走的时候
在特定环境中,”位置“细胞在环境中的某一个位置点放电激活,而”网格“细胞则在多个具有规则间隔的位置点放电(激活)。(额外参考资料,https://zhuanlan.zhihu.com/p/19862962)
This figure shows the firing locations of (a) a place cell and (b) a grid cell placed over the path of an animal in a square environment
该图显示了当动物在一个方形环境中移动的运动轨迹,并分别在
- 图a,显示的是”位置“细胞(place cell)
- 图b,显示的是”网格“细胞(grid cell)
处于放电激活状态的实验。
该图显示了当动物在一个方形环境中行走的时候(a)位置细胞和(b)网格细胞的兴奋位置。
(Annual Review of Neuroscience by Annual Reviews. Republished with permission of Annual Reviews, from [34]; permission conveyed through Copyright Clearance Center, Inc.).
(图像摘录自神经科学年鉴(Annual Review of Neuroscience)[34],并通过美国版权清算中心(Copyright Clearance Center)授权许可。)
2.2 paragraph
With the development of techniques to record neural activity in the brain of animals [27] came the identification of place cells in the rat hippocampus by O’Keefe and Dostrovsky [28].
随着记录动物大脑神经活动(neural activity)技术的发展[27],O'Keefe和Dostrovsky[28]得以识别出大存在老鼠大脑海马体(或叫海马区,hippocampus,可以认为是记忆中心,额外批注)中的位置细胞(place cell)[28]。
Place cells fire when the rat is in a particular place in the environment [see Fig. 2(a)], and the population of place cells cover the entire environment [29], [30].
当大老鼠在环境中的特定场景地方时,位置细胞(place cell)会放电(激活)[见图 2(a)],同时这些(放电的)位置细胞的数量会涵盖在群覆盖着整个环境区域中[29],[30]。
Furthermore, if a rat moves from one environment to another, the same place cells can be used to represent multiple different environments.
此外,如果大老鼠从一个环境移动到另一个环境,相同的位置细胞可以用在来表示多种不同的环境中。**
O’Keefe and Conway [31] proposed that these place cells form a part of Tolman’s cognitive map.
O'Keefe和Conway在文献[31]中提出,这些位置细胞就是构成了Tolman所说的认知地图(cognitive map)的一部分。
The understanding about the relationships between neural activity and places in the world was extended by the discovery of head direction cells in the dorsal presubiculum [32] and of grid cells [33] in the medial entorhinal cortex.
通过背部前下托的头向细胞[32]和在中间内嗅皮层中的网格细胞[33]的发现,神经活动和实际地点之间关系得到进一步了解。
随着对大脑的深入研究的不断深入中,分别借助在(海马区)前后下托(dorsal presubiculum)中发现的“方向”细胞(head direction cells)和在内侧嗅皮层(medial entorhinal cortex)中发现的“网格”细胞(grid cell),使我们得以深入了解神经活动和真实场景之间的关系。
dorsal presubiculum: 摘录自wiki [Subiculum],The dorsal part of the presubiculum is more commonly known as the postsubiculum, postsubiculum 医学术语,Google Search 摘录自[感知地图的神经环路基础] 王琳,王亮 (额外批注)
Head direction cells fire when an animal turns its head in a particular direction relative to its body, while grid cells fire in multiple places in the environment, in such a format that their firing fields form a regular grid [see Fig. 2(b)].
“方向”细胞是一种当动物的头朝着特定的一个方向时便会激活的神经细胞(摘录自知乎),而“网格”细胞在环境中的多处个位置放电(激活)处兴奋,它们的兴奋放电(激活)的区域就形成了规则的网格状(结构)[请见图2(b)]。动物沿特定方向转动头部时,头向细胞会兴奋,
2.3 paragraph
Place recognition, as observed via the firing of place cells, is triggered by both sensory cues and self-motion [29].
通过位置细胞的兴奋位置,我们观察到场景识别被感官信号和自身运动激发[29]。
那么我们所说的场景识别,就是通过感知线索(sensory cues,感觉和知觉等外部输入,额外批注)和(人或动物的)自身运动触发,并由处于放电激活状态的“位置”细胞捕察到(observed)[29]。
Studies with rats show that place cell firing is initially based on self-motion, but if the environment is changed—by altering the distance between start and end goals, for example—the place cell will update to the correct location according to the external visual landmarks [35], [36].
对老鼠的研究显示表明,“位置”细胞放电最初是由动物基于自身运动产生的而兴奋,但如果环境发生改变——例如,改变出发点和目的地之间的距离发生改变——那么“位置”细胞会根据外部看到的地标(landmarks)校正到正确的位置[35],[36]。
The correction may occur smoothly or abruptly, depending on the size of the mismatch.
根据(场景)配准误差(mismatch)的大小的程度,校正的过程(correction)可能是平滑的平缓的(smooth),也可能是突然剧烈的(abrupt)。
copyright belongs to Visual Place Recognition: A Survey 图片摘录自基于视觉的场景识别:综述
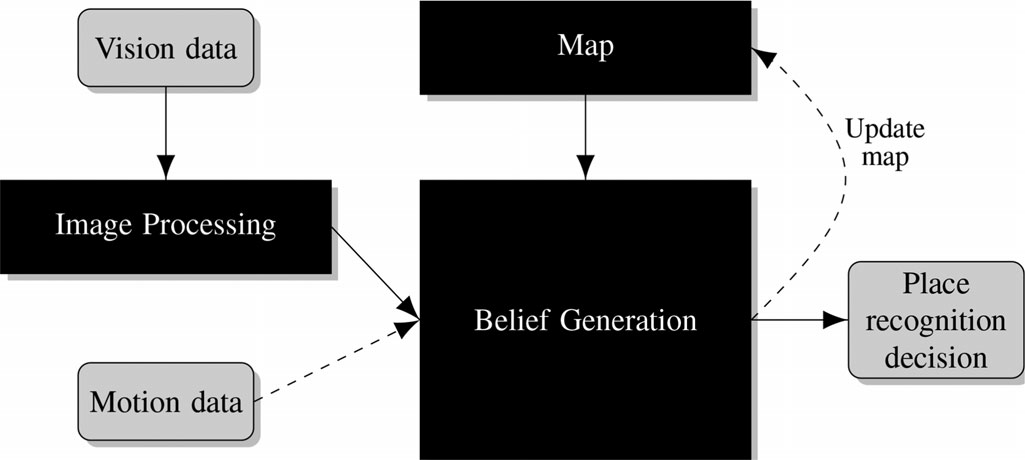
Fig. 3. Schematic of a visual place recognition system.
图3 视觉场景识别系统的框图。
Incoming visual data is processed by the image processing module.
输入的视觉数据由图像处理模块处理。
The robot’s knowledge of the world is stored in the map.
机器人对世界的感知信息存储在地图中。
The belief generation module decides whether the current visual data matches a previously stored place.
置信度生成计算模块决定当前(获取的)视觉信息是否与先前存储的历史场景记录地点相匹配。
Motion information is also often included, and the map may be continually updated during operation.
系统中通常还包括(机器人)运动信息,地图在(机器人)运行过程中可以不断地更新。
2.4 paragraph
Many of the same concepts arise in robotics.
许多与上面相同的概念会出现在机器人中。
机器人学科中也用到了上述相同的概念。(个人觉得这里强调机器人学,额外批注)
Most robots have access to external observation data as well as self-motion information.
大多数机器人能够获取外部观测数据,以及自身运动信息。
Topological and metric relationships between places are used in combination with sensory cues to determine the most likely place, similar to the neuronal firing of the place cells.
并通过地点与地点之间的拓扑关系(Topological)和度量关系(metric,对距离,高度,角度等的几何测量,备注译者理解),并结合(传感器的)感知线索(sensory cues)来确定最相似的位置,与感官信息结合来确定最可能的位置,这一点和“位置”细胞的神经元放电(确定位置信息)相类似。“位置”细胞的神经元兴奋。
Fig. 3 presents a schematic of a visual place recognition system.
图3描述了视觉场景识别系统的框图。
Visual place recognition systems contain three key components—an image processing module to interpret the incoming visual data, a map that maintains a representation of the robot’s knowledge of the world, and a belief generation module, which uses the incoming sensor data in combination with the map to make a decision about whether the robot is in a familiar or novel place.
基于视觉的场景识别系统包含三个关键组成部分:
- 图像处理模块,用于解释(interpret)输入的视觉数据,
- 地图(map)模型,就是机器人的知识库,用于维护机器人对环境世界的感知程度,
- 以及置信度
生成计算(belief generation)模块,通过输入的传感器数据与地图信息相结合(比如说配准等手段,译者额外添加备注),来判断(当下)机器人是在“故地重游(返回到历史场景记录,额外批注)还是在开拓新疆界(探索新区域,译者额外批注)”一个到过的地方还是处于一个新的地点。
A place recognition system may also use motion or transition information to inform the belief generation process.
置信度计算模块的输入数据:
- 机器人自身运动信息(比如说里程计,惯性传感器等,译者额外添加备注)
- 经由图像处理模块处理之后的信息(视觉传感器,激光等,译者额外添加备注)
场景识别系统还可以将运动信息或图像处理后的信息提供给置信度生成模块。
Furthermore, most place recognition systems are designed to operate online and, thus, must update the map accordingly.
此外,大多数场景识别系统为能够在线(online)操作,并因此必须实时更新地图。
2.5 paragraph
This paper discusses what qualifies as a place in the context of robotic navigation.
这篇文章将讨论了在机器人导航中“地点”(place)这个字眼的概念需要满足怎样的特质?
It then looks at the three key modules that make up the place recognition system: the image processing module, the mapping framework, and the belief generation module.
它将着重介绍眼于组成场景识别系统的三个关键模块:
- 图像处理模块,
- 地图模型,
- 和置信度计算模块。
The paper then turns to the problem of changing environments.
接着然后,本文还将讨论场景的环境变化。的问题。
It revisits each of the modules—the image processing module, the mapping module, and the belief generation module—and investigates how each has to be adapted to incorporate the notion of appearance change into the place recognition system’s model of the world.
然后针对环境变化的问题,论文将重新讨论每个模块——即:图像处理模块,地图模型,和置信度计算模块,并且研究场景识别系统的每个这些模块如何适应环境的这种外观变化。并且研究位置识别系统的每个模块如何适应环境的外观变化的。