I. I NTRODUCTION 引论
1.1 paragraph
VISUAL place recognition is a well-defined but extremely challenging problem to solve in the general sense;
一般来说,视觉场景识别是一个定义明确目标明晰(个人偏好,额外批注),但又极具挑战性的问难题;
given an image of a place, can a human, animal, or robot decide whether or not this image is of a place it has already seen?
给定一张场景图像,那么人、动物或机器人能不能判断这个图像中的地方是否已经看到过似曾相识呢?(个人偏好,额外批注)
Whether referring to humans, animals, computers, or robots, there are some fundamental things a place recognition system must have and must do.
无论对于人类、动物、计算机还是机器人来说,一个场景识别系统需要具备哪些以下基本内容要素呢?(偏向意译,额外批注)
First, a place recognition system must have an internal representation—a map—of the environment to compare to the incoming visual data.
首先,场景识别系统内部必须具有对地理环境内部表示建模——即环境地图,可以用来与输入的视觉(传感器)数据(类型)兼容且能够进行比较。
首先,场景识别系统内部必须有一个环境模型——即地图——用来和输入视频数据进行比对。
Second, the place recognition system must report a belief about whether or not the current visual information is from a place already included in the map,and if so, which one.
第二其次(个人偏好,额外批注),场景识别系统必须判断当前视觉信息是否表示已经存在包含在历史地图记录中中地点,如果是得到肯定的判断,是哪一个那么接下来的问题就是它在哪个历史场景中出现过?
Performing visual place recognition can be difficult due to a range of challenges;
基于视觉的场景识别比较有挑战性;
基于视觉的场景识别有如下一系列的难题;
the appearance of a place can change drastically (see Fig. 1),
地点场景的外观可能会急剧变化(见图1),
copyright belongs to Visual Place Recognition: A Survey 图片摘录自基于视觉的场景识别:综述
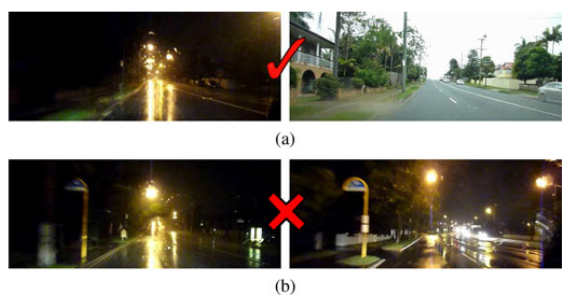
Fig. 1. Visual place recognition systems must be able to (a) successfully match very perceptually different images while (b) also rejecting incorrect matches between aliased image pairs of different places.
图 1. 视觉场景识别系统必须能够
- (a)图 成功
地匹配感知上外观差异较大的同一场景(图像,比如受到昼夜,天气影响等) - (b)图 还要剔除外观极其相似,但是属于不同场景的图像 (偏向意译,就是说,相似度极高的不同场景,也能分辨出来,额外批注)
不同地方的易混叠图像对之间的误匹配
multiple places in an environment may look very similar, a problem known as perceptual aliasing,
环境中的不同地方场景可能看起来非常相似,即:感知偏差感知混叠混淆(不确定,可以讨论,额外批注,混淆比偏差更加凸出相似性)问题,
and places may not always be revisited from the same viewpoint and position as before.
观测时与地图存储时机器人的方位不同,这些都会造成基于视觉的场景识别执行起来比较困难;
还有,就算是访问到之前的场景,但是观测的视角和位姿不同,(那么获取的视觉信息就不同,对场景识别也是不小的挑战)。(额外批注,可以意译)
1.2 paragraph
In robotics, this research topic is highly relevant given the ever increasing focus on long-term mobile robot autonomy and rapid improvements in visual sensing capabilities and cost.
考虑到对持久作业移动机器人移动机器人自主持久作业的需求自主性的日益增加重视,以及视觉感知能力和成本的快速提高,该研究主题在机器人学中是非常重要的。 (说白了,就是这些领域的发展离不开视觉场景识别,额外批注)
在自动控制机器人领域中,持久作业的移动机器人如何提高独立自主性,并且具有持久作业的能力,以及及其视觉传感器感知能力性能的提升,这些都和视觉场景识别这个研究领域息息相关。 (意译,额外批注)
Vision is the primary sensor for many localization and place recognition algorithms [1]–[19].
视觉是众多定位和场景识别算法的主要传感器首选传感器是基于视觉作为的传感信息(文献[1]-[19])。
Place recognition is also a growing research field, as evidenced by citation analyses and a number of dedicated place recognition workshops at recent and upcoming robotics and computer vision conferences including the IEEE International Conference on Robotics and Automation (2014, 2015) and the IEEE Conference on Computer Vision and Pattern Recognition (2015).
同时,场景识别也是一个在不断扩大的研究领域,(相关论文的)引文分析可以证明这一点,而且在以及近些年来机器人学和计算机视觉学术会议上,涌现出众多会有专门关于场景识别的研讨会,其中包括 ICRA(2014,2015)和CVPR(2015)
- IEEE International Conference on Robotics and Automation
- IEEE Conference on Computer Vision and Pattern Recognition
The problem of persistent place recognition has also formed a regular component of many more general workshops including the long-running ICRA Workshop on Long-Term Autonomy (2011–2014).
作为一个持久的科研话题,长期的场景识别问题也成了许多研讨会的常规主题,包括每年长期举办多次会议的ICRA研讨会(2011-2014)。
包括专门针对“长期自主性”的ICRA研讨会(2011-2014年)。
Our aim in writing this survey article is to provide a comprehensive review of the current state of place recognition research that is relevant both to robotics and other fields of research including computer vision and neuroscience.
我们写这篇综述的目的是,提供一个全面的场景识别研究的了解场景识别研究的现状,包括和场景识别密切相关的研究领域的发展动态,诸如机器人学和其他领域的研究,包括计算机视觉和神经科学。这也与机器人学和其他领域的研究,包括计算机视觉和神经科学相关。
The timing for such a survey is particularly fortuitous given major events across these related fields: for example, the almost universal usage of deep learning techniques in state of the art recognition systems in computer vision, and the 2014 Nobel Prize in Physiology or Medicine award to Edvard Moser, May-Britt Moser, and John O’Keefe, who discovered the key representations of place in the mammalian brain.
写这个综述的时机较好,因为相关研究领域都取得了一些重大突破:比如,在计算机视觉领域内,最先进的识别系统几乎普遍使用深度学习技术,深度学习技术广泛应用在最先进的计算机视觉识别系统中,又比如,2014年诺贝尔生理学或和医学奖授予了Edvard Moser,May-Britt Moser和John O'Keefe,表彰他们发现哺乳动物构成大脑定位系统的细胞的学术贡献。的描述方法。
This paper provides an overview of the place recognition problem and its relationship with many major robotics research fields including simultaneous localization and mapping (SLAM), localization, mapping, and recognition.
本文提供了场景识别问题,以及该问题与以及和它相关联的许多其他众多机器人学研究领域之间的概貌。的关系,(这些机器人学研究领域包括实时定位与建图(SLAM),定位技术,地图构建和识别技术)
Because of the increasing focus in the research community on long-term robot autonomy in challenging environments, we also provide a particular focus on the problem of lifelong visual place recognition for robots.
由于研究人员学术圈越来越重视关注机器人在恶劣如何能够在具有挑战性的环境中,具备长期自主性的能力,所以我们还特别讨论了如何使机器人视觉场景识别能力得以持久(lifelong)的话题问题。